疫情后很多人问我会不会回国,比如回深圳生活,但在我心里,深圳早就不是我当年读书时那个城市了。我在暨大上学的第一年,刚入学时计划将高中时创办的社团在大学里做起来,海报刚贴出去两天,就被管理学院的老师和学校保卫处找来谈话,虽然时间过去了这么多年,我的照片也被当做所谓优秀毕业生贴在暨大管理学院大楼的展示栏里,但我仍然清楚地记得那句话,他们对我说:「你为什么不做点对社会有用的事情?」很明显,他们认为思考与思维的自由对社会没用,我想,这就是许多中国人对自由的理解。
中国需要的是高楼大厦和尖端科技,生活的哲学造不出这些民族复兴的要素,然而恰恰是这些东西,让人无需思索却能认可自己奋斗的方向毫无疑问的正确,就算是外国人,也能在朝鲜化的生活中寻求到它。我不觉得美国从「垮掉的一代」到 GenZ 理解不了自由,只是,过于自由的生活让他们无法简单的寻求到意义,你可以从二战以后出生的所有美国人身上找到这种影子,他们以为自己需要的是自由,背地里却是秩序与秩序下大脑的自我麻痹。
我认同视频中主持人说的那句话,不要假想别人需要的自由是什么,自由就是自由,正如意义就是意义,秩序就是秩序。二战之前德国人把秩序当做自由,妄图用秩序改造全世界所有人的自由,后来的事情大家都看到了。几十年过去,真正泛滥的自由在美国塑造的影响,我们也能看的一清二楚,但我们不能混淆着两者和他们的危害。自由是无用的,但却非常有必要。秩序很有用,但却并不总是必要。
自由与秩序各司其职,如果非要分出个重要与否,我认为是自由,如果没有基因突变,也不会有癌症,但自然也不会有进化,宇宙的根本状态是混沌,自由才是冲破它的枷锁。






今天为 https://t.co/2Txl7T4a7s 补的不是很酷的功能,基本都是「不要装作已经能用」:移动端面板现在可以真的看邮件、进详情再返回;收信端把 D1 / DB9 的 inbox、code、sync、detail 对齐,验证邮件不会一边能取 code 一边列表消失;部署也加了 Sandbank preflight 和 keep-vars,别让 CI 顺手把 Worker 变量洗掉。

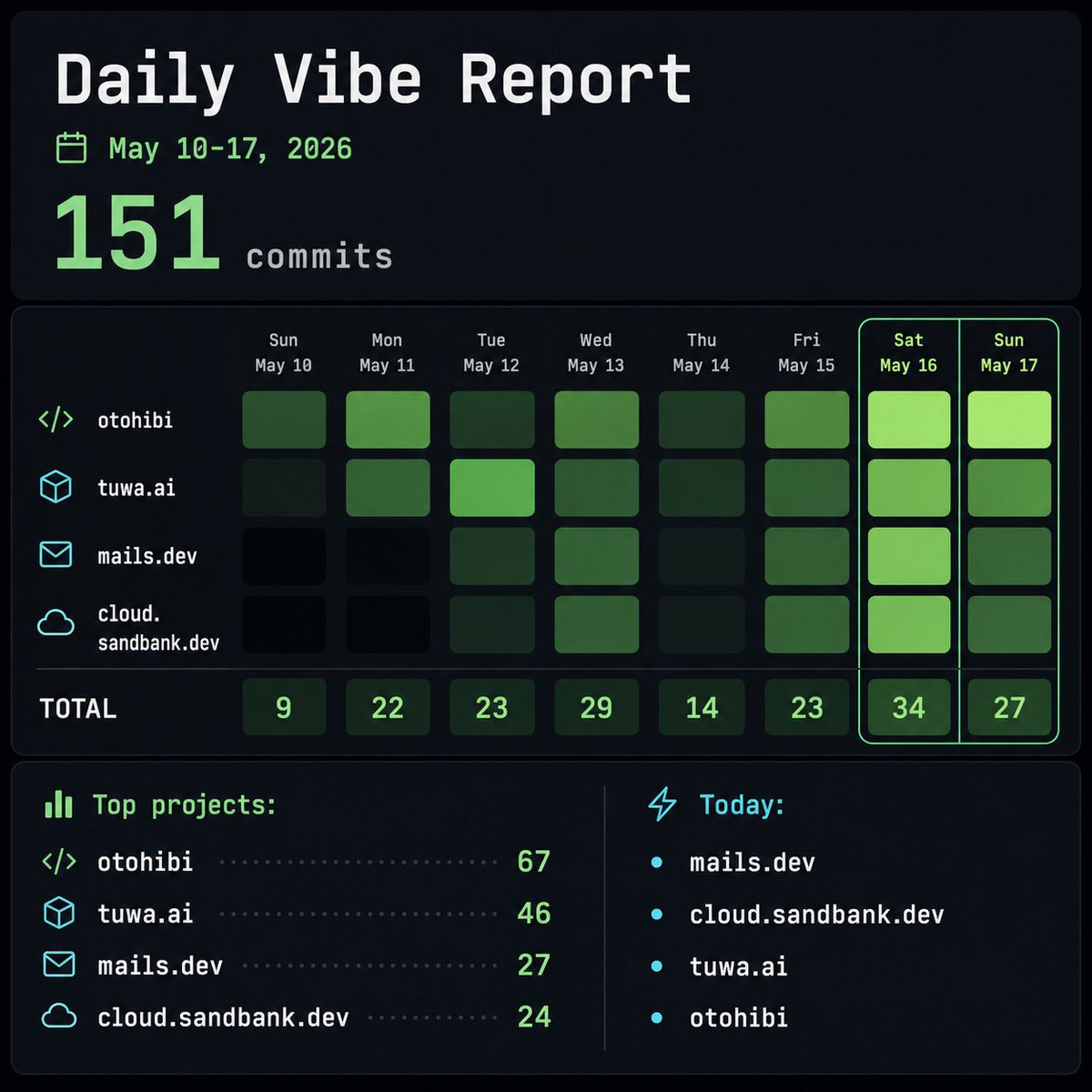
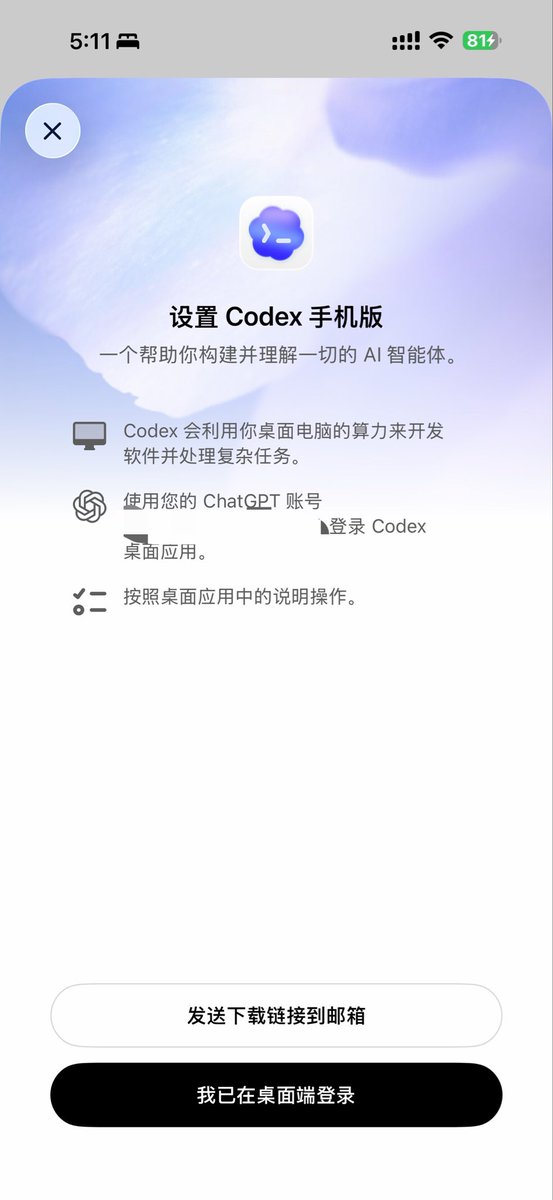
我在尝试使用 codex app 的远程连接功能将我本地 mac studio 上所有活跃的 git 项目全部迁移到我的 sandbank tyo 节点服务器,创建了一个单独的 workspace 来负责开发,测试和构建。然后,我设置了一个服务器的定时任务将这些 git 仓库同步提交到 github,这样我就不再使用 本地开发 -> GHA -> runner -> 生产环境 的工作流程,而是彻底反过来,直接使用 codex 控制生产环境,这和当初 wanman 设想的目标是一致的,wanman 使用 sandbank 的 boxlite 隔离环境在服务器中实现,现在可以轻而易举的通过 codex app 来做到,不需要依赖其他 harness app 或 chat UI app

不知道现在支持不支持 ibkr?



是的,我几乎也不再使用计划模式了,可以看到 codex 本身有了更严谨的规划和分解的能力,在 harness 它最近两个月追赶和超越 claude code 的势头很强。